gallery
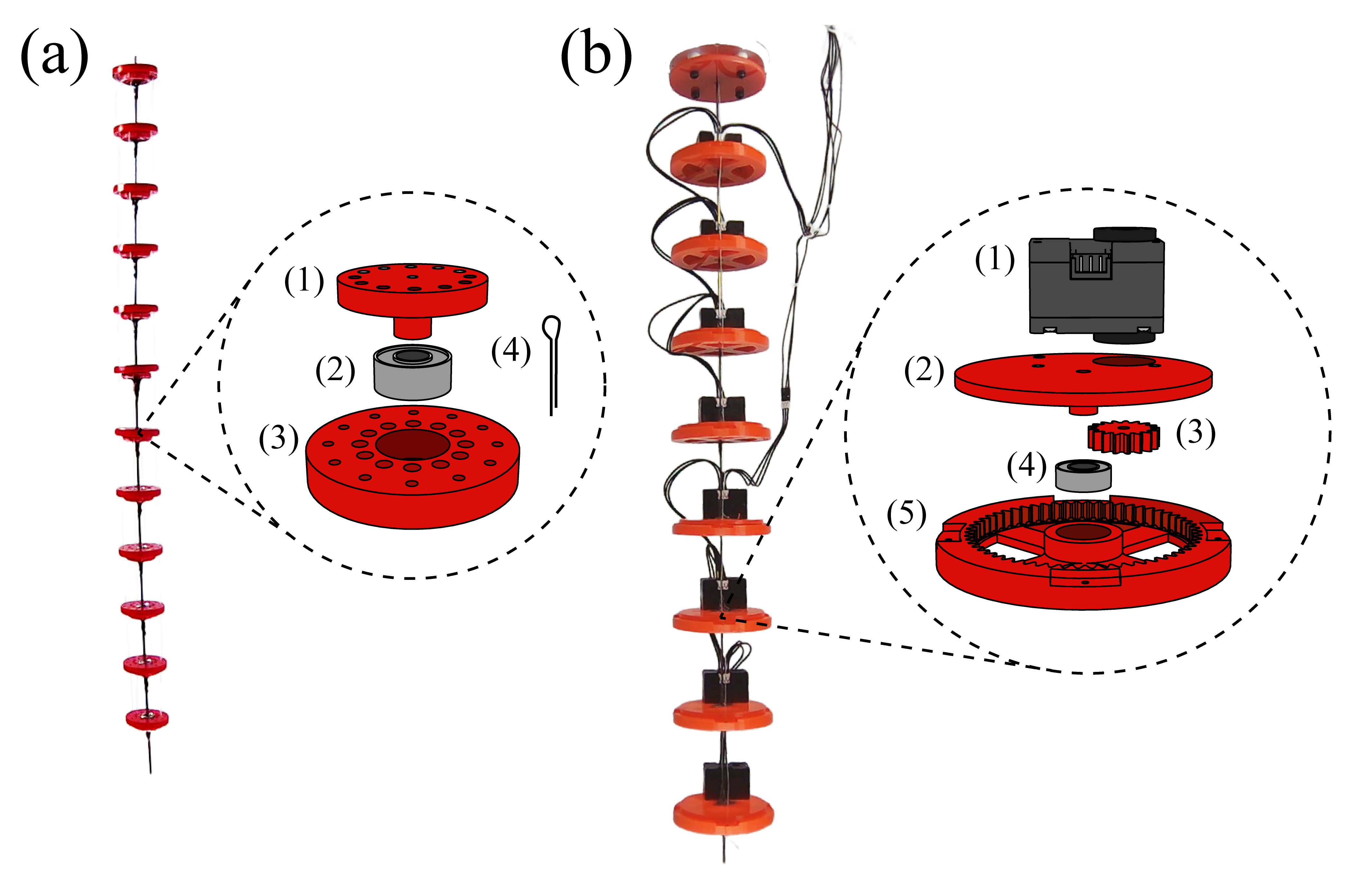
(a) The DDL manipulator comprises two split parts (1) and (3) held
together by the bearing (2). Part (1) is fixed to the backbone while
part (3) can be twisted manually and locked with (1) using a cotter
pin (4). The CDR manipulator (b) uses a similar principle, except
automated rotation is enabled by the servo motor (1) which enables
relative rotation of part (5) using a spur gear (3).
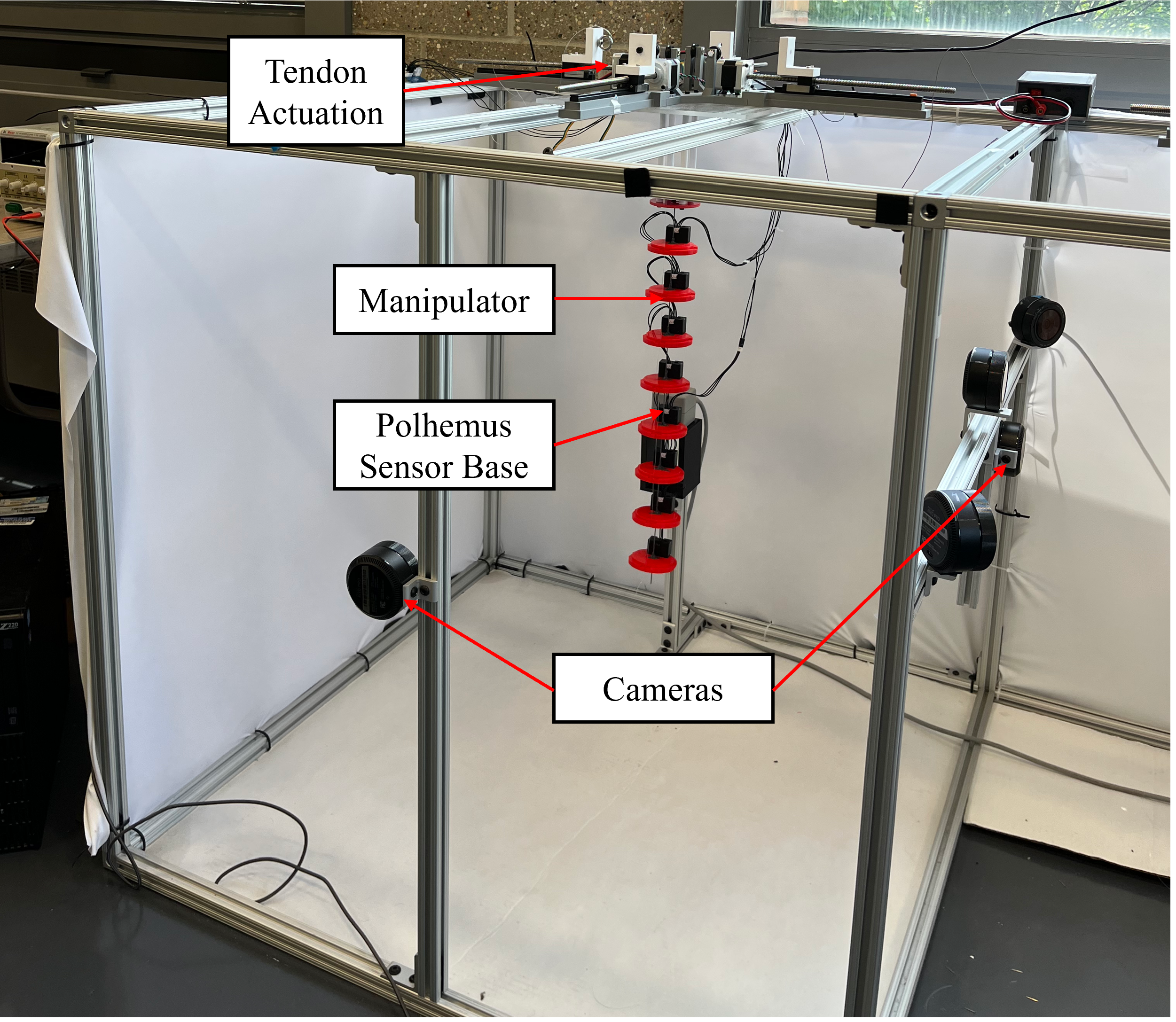
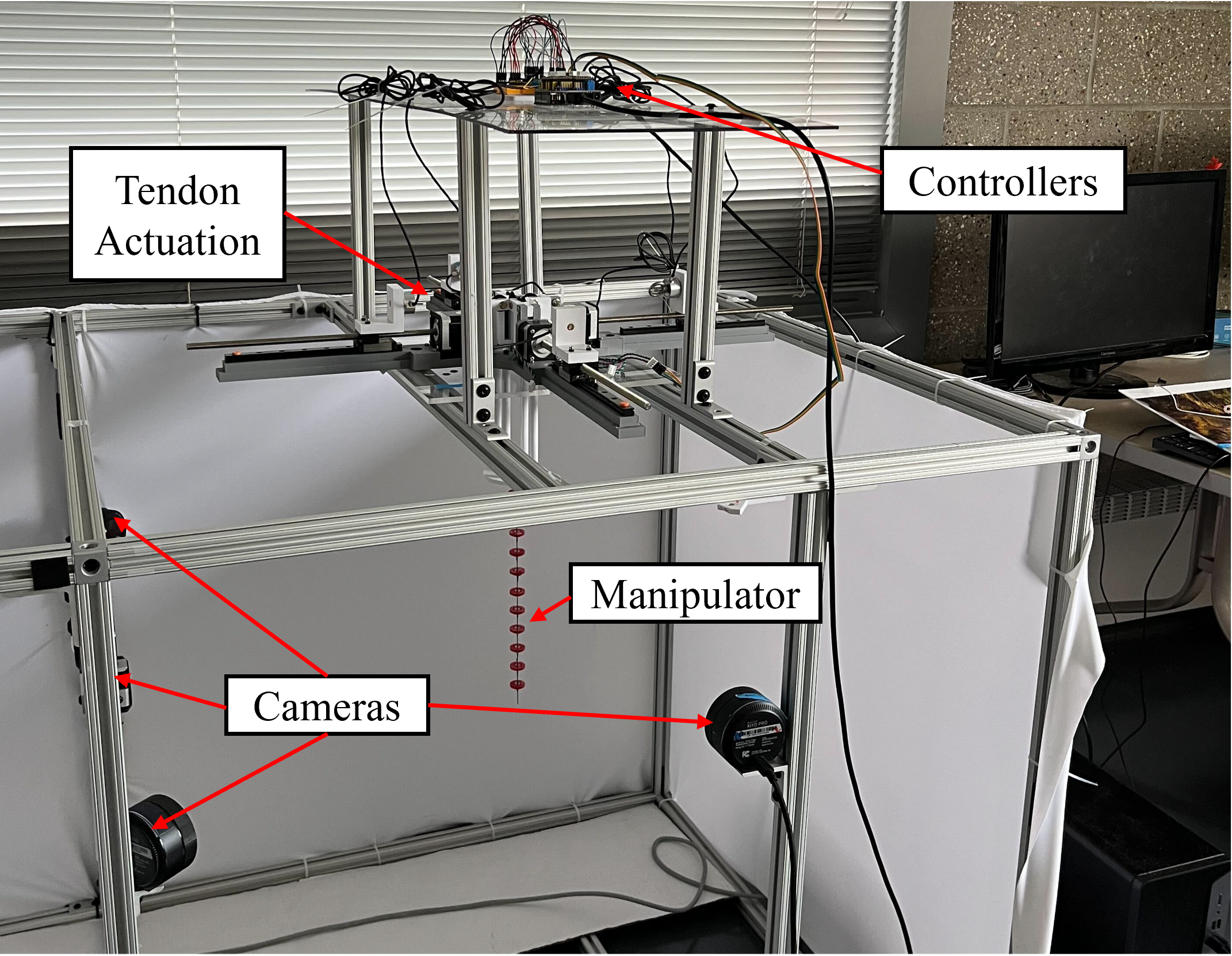
Experimental setup for the DDL manipulator.
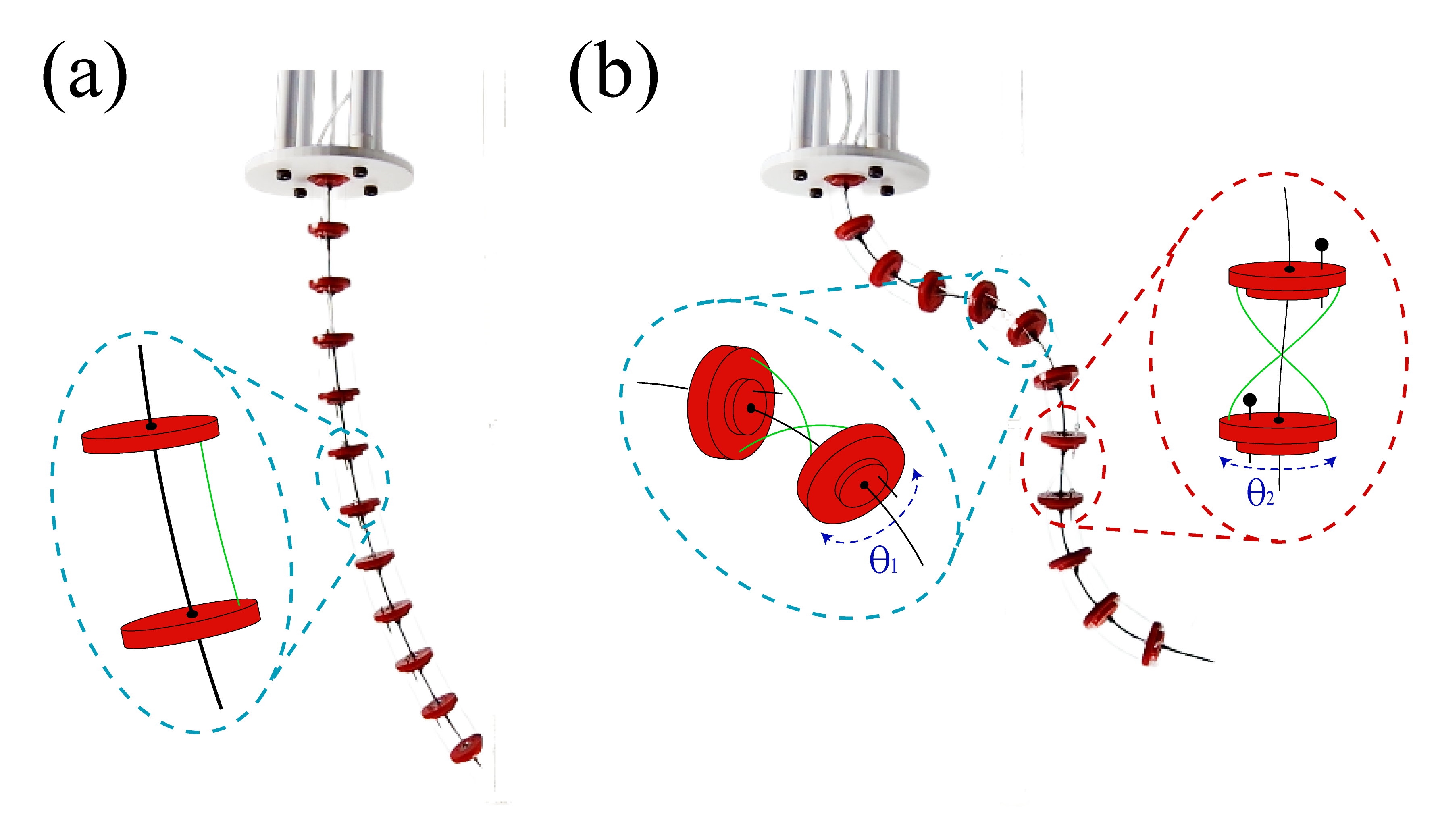
Standard parallel tendon driven continuum arm versus the continuous
disk rotor (CDR) in curvature capabilities.
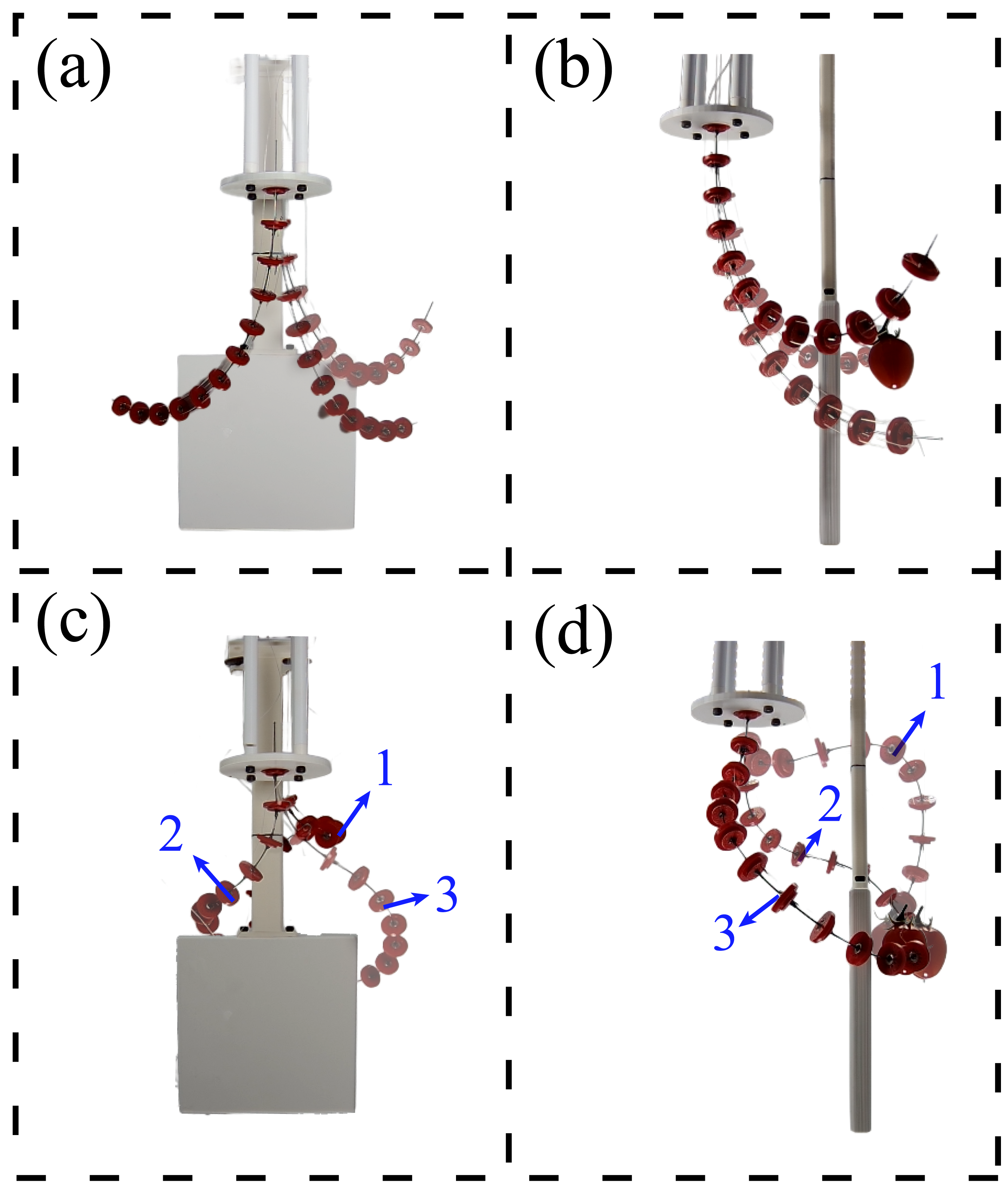
Obstacle avoidance of a parallel and general routed manipulator a)
front parallel b) side parallel c) front general d) side general, in
all three general cases the general routed manipulator was able to
hit the tomato around the obstacle.
Setup for the CDR manipulator. Also the setup used in the ir Force
Office of Scientific Research (AFOSR) project for SURI ATLAS.