gallery
more to come with final publication! (simulation, validation, applications)
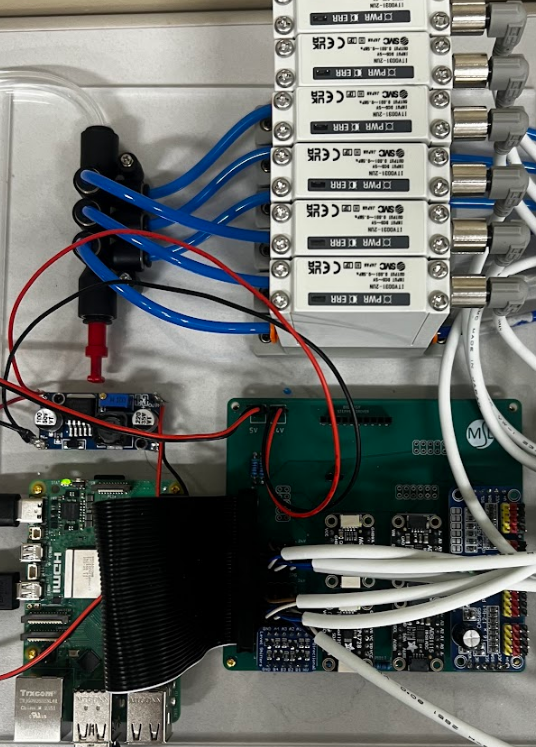
A newly designed version of the original PCB for BR2s to incorporate
additional soft continuum control components (DAC, ADC,
electropneumatic regulators, controllers, servos, etc.).
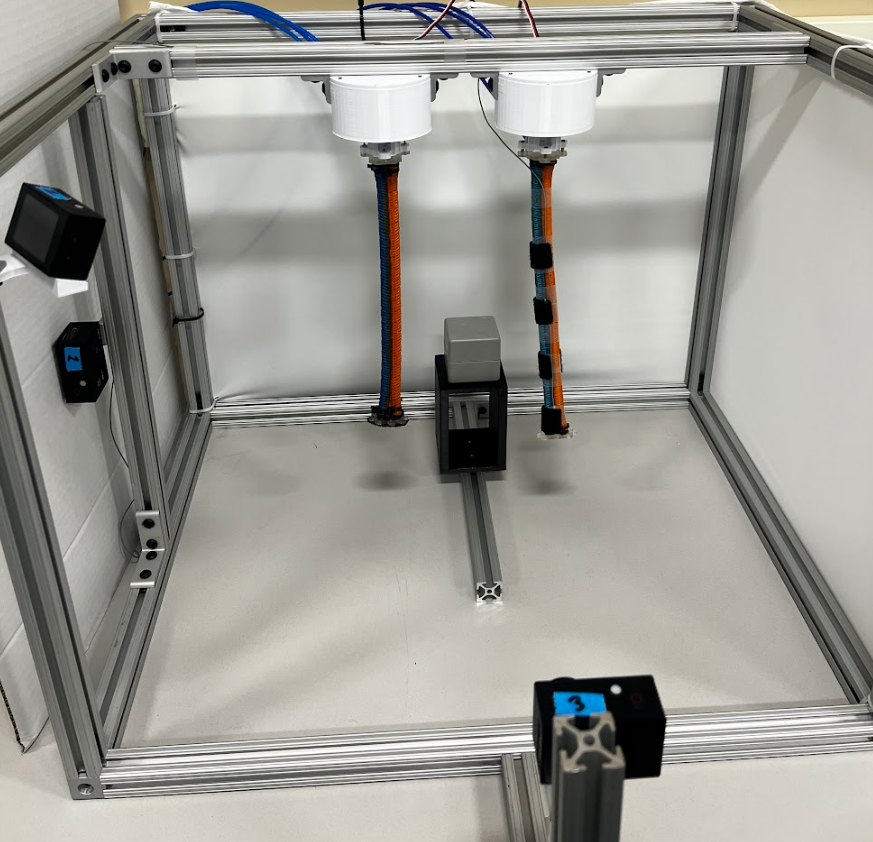
The base setup for two parallel soft continuum manipulators to work
in together to achieve various tasks and improve metrics.